



PTP运动方式是时间*短的移动方式。在KRL程序中,机器人的**个指令必须是PTP或SPTP,因为机器人控制系统仅在PTP或SPTP运动时才会考虑编程设置的状态和转角方向值,以便定义一个**的起始位置。
为了加速运动过程,可以通过“CONT”设置运动指令的轨迹逼近(类似转弯半径),轨迹逼近意味着将不**到达点坐标,只是逼近点坐标,事先便离开**保持轮廓的轨迹。
PTP运动的轨迹逼近是不可预见的,相比较到点的**暂停,由于这些点之间不再需要制动和加速,节拍时间得以优化,程序可以更快的运行。
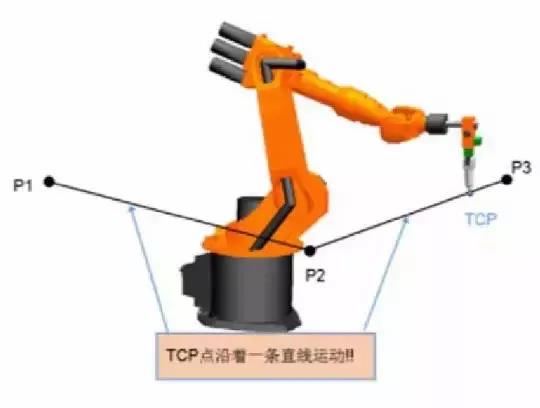
2、 线性运动
3、 圆周运动
圆周运动是机器人沿圆形轨迹以定义的速度将TCP移动至目标点。圆形路径是通过起点、辅助点和目标点定义的,起始点是上一条运动指令以**定位方式抵达的目标点,辅助点是圆周所经历的中间点。在机器人移动过程中,工具**姿态的变化是设定点之间的中间姿态。
4、 样条运动
样条运动是一种适用于复杂曲线轨迹的运动方式,这种轨迹理论上可以通过LIN运动和CIRC运动生成,但是相比下样条运动在轨迹平滑上更具有优势。
